-
Screecher
As I mentioned Vandelay Industries has partnered with SunOx earlier this year. When spending some time on the farm with Mr Delorme I had a chance to drive around the Screechers. They are a 100% solar powered golf cart which is about 15mph. Had much fun driving it around! Contact SunOx or myself for more details if your interested.
-
Never Forget
On the morning of September 11th 2001, a normal sunny autumn morning, I was on my way to the office (Fidelity Investments) at the World Trade Center Boston. I was stepping off the shuttle bus from the Subway (Boston refers to the underground transportation as simply the T). I heard the news broadcast announcing the first plane had hit the World Trade Center New York. I was taken aback as stepping off but figured I head wrong or hadn’t sunk in yet. I made my way inside and the trading floor was like nothing I had seen in there before. Usually quiet and traders staring at screens had become a…
-
New Partnership with SunOx
I’m proud to announce Art Vandelay has recently established a new partnership with SunOx. SunOx Farming the Sun is the brainchild of none other than David DeLorme of DeLorme Mapping and Garmin handheld emergency devices. David is a neighbor a few miles away and contacted me regarding SunOx. We will be working on future products for agricultural solar powered products in a small team. This involves embedded Linux robotics and radio based communications to accomplish this goal and happy to help out with such esteemed colleagues. Be sure to checkout the videos of the projects underway and their progress! So in addition to the long list of, hey I saw…
-
Neatokeen feature
A neat new feature in the Architectual software! I use Mitek software daily to design, which now allows me to have the 2D blueprint under my 3D CAD. A mostly useless feature, but just makes it pop and looks cool when aligning my measurements. The little things in life.
-
Gail The Snail
This plan went off the rails and totally backfired. Instead of sweeping it under the rug I figured I post it anyhow in it’s full glory. Mary was suppose to roast me, I suggested she throw in a few jabs at my a$$hole cousin and my bad work ethic. She did a great job, but I should have specified that I wanted her in character as Gail with her saliva slurping and HJs under the table jokes. The 9/11 reference of my work history at the WTC didn’t go over well. Check out my resume in the tech subsection if your curious. My fault, she’s a wonderful actress on the…
-
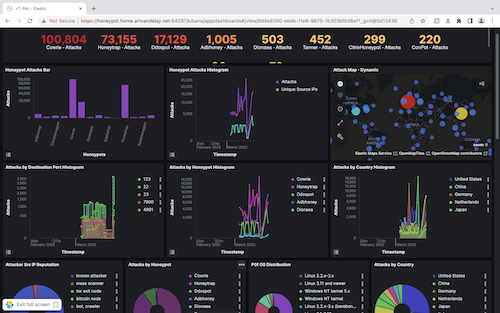
Welcome to my WarZone
There is another side of the internet that we don’t see everyday or talk about, the silent war. The keyboard cowboys in the digital wild west. Today I setup a honeypot scanner today and within the first few minutes was able to visualize the constant bombardment internationally. Everyday I got people trying passwords, attempting to exploit me, nosey scanners who just want a peek, botnets trying to get a foothold, etc. These actors are not all bad, but most of them should seriously ask why they are watching me. I installed a honeypot setup called T-Pot which has many options for a network hive of honeypots all collecting data on…
-
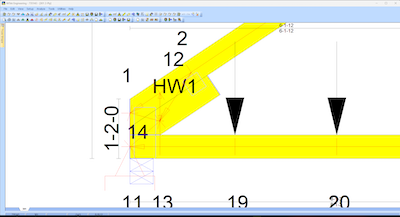
Heel Analysis
ARCHITECTURE Heel Analysis Methods. When I design heels for a truss, I try to not use more wood than I need. Throwing wood at a problem doesn’t always fix things. For example, I have a slider on this heel as the heels are high. The top chord doesn’t specifically need them for stability or deflection. I have a pinned bearing and I can analyze the heel with a few different methods. In these two illustrations the red line represents the analog of the truss. I analyze with a single analog on the heel and my slider is several feet long as the next joint is the web. In the right…
-
Post Holidays Recap
Happy Fesitvus! I trust everyone had a delightful holiday season. My wife and I in the Vandelay homestead had a beautiful Christmas. Our electricity had gone out from an abysmal storm the day before and a flooded basement with a few inches of water. It had taken the local power company roughly 24 hours before it was restored. We had a nice time anyhow with other fuel sources and much love and patience. We ducked out of our own home fore a little while and spent time with our loved ones who did have electricity before us in New Hampshire. Our New England family was pleasant company on a cold…
-
The potato crown, Idaho versus Maine
I live in the state of Maine and architect for a company in Idaho. Which raises an age old rivalry. Which potato is better?
-
How to make a miter cut
Here is some simple math if you have the right tool. Trying to miter two angles is not always the easiest task. Let me preface this with I would recommend a Jobber Calculator if you convert from feet-inches to pitches, degrees or other regularly. They are not paid advertising, just the tool I use regularly. If your a math person, you know how instrumental a Casio TI-84 was in school. There is probably a Texas Instruments app for this as well that I haven’t looked into. The other tool I use all day everyday is a piece of software shown below is Mitek engineering. For this example I want to…
-
Happy Thanksgiving, gobble gobble!
Have a great Turkey Day! This year Regina and I will not be going anywhere. From the comfort of our home we are hosting dinner for my in-laws. Regina’s folks are fantastic company as we usually attend their Thanksgiving out of state. My beautiful and charming cousin Katrina graciously extended an invitation to attend their Thanksgiving with other cousins, but we sadly had made other arrangements. Although she did share her recipe for twice baked potato casserole which we could not get enough of several years ago. And thank goodness Pennypacker and Varsen can’t make it! Regina and I have much to be grateful for. We survived our first year…
-
Kevin McDonald
Kevin McDonald from the Kids in the Hall. Kevin ran in the hallway again. This guy gets it.
-
Rise and Run
Vandelay Industries doesn’t architect per se. However, when I’m architecting a roof for my potato loving friends in Idaho, I use a few basic math skills. I got to thinking, I should share a few ideas with Seinfelders and future architects. Here are a few tips if you want to pretend to be an architect. In algebra there is a simple formula for calculating angles of triangles. I utilize this formula almost every day when designing roof trusses. Most all kids in the United States learn this at some point and is usually GED (general equivalency diploma) level of education in the United States. In this case today, I want…
-
NewsLeak
NewsLeak is a creation I designed in my spare-time. An online news article magazine called NewsLeak. This webpage was the inspiration of a hobby when I was a small child. An old childhood associate and myself coauthored NewsLeak probably 35-40 years ago. I would write articles of the latest happenings on my manual typewriter and we would pass out the crudely made paper to friends of the family. NewsLeak is reinvented for the 21st century. I currently have NewsLeak scrape RSS News articles from across the internet and then have an Artificial Intelligence rewrite the articles. The photos are also drawn by artificial Intelligence. So check out a work in…
-
The Architect
IRONY The Architect. Despite my long career in technology and finance, I’m also an architect for a company in Idaho. More specifically I design rooves all day. Roofies are my thing. It’s a simple job, but someone has to do it and I don’t think they could live without me. Snow in Maine gets heavy and deep and the rooves need adequate structural engineering to withstand the harsh winters. I don’t think this job would transfer well to Egypt or some other climate. I didn’t even ask to be an architect. They said they needed help with Oracle and software development and when I got to the interview they pulled…
-
Mr and Mrs Vandelay
Mr and Mrs Art Vandelay were Married on May 21st, 2022 in Destin Florida along the shore. The Guests The Marquis and Meier Families had finally met and mingled at the day of the wedding. Adrianna, the bride’s maid, drove all the way down from Kansas with her beau. What was sweet is my cousin’s husband Jonathon offered to be my best man at the last minute. However, there were a few notable missing guests as Mr Pennypacker was not able to attend the wedding and Varsen was a no show. The Event The wind was blowing off the ocean and the waves were huge that day, several feet high.…
-
Americas, Symbol XYM node online…
You have probably heard about BitCoin and perhaps Ethereum or NFT. Which is all well and good, welcome to decentralized and value added internet. Ethereum gas prices got you down? Your digital assets stuck in your wallet and can’t afford to move them? Tired of transaction block confirmation times waiting hours at a time? Enter Symbol (XYM). The Eastern side of the world developed some blockchain technology which hasn’t caught on in the USA (yet). They are big in Japan were you can purchase things at brick and mortar stores with XYM coin from your phone. Transaction times are a fraction of a second and gas prices adjust for inflation…
-
The Childlike Empress
Tami Stronach who plays the role of Childlike Empress on The Neverending story wishes Art and Gina Vandelay a beautiful wedding. Thank you Tami for making an appearance! Gina thought Tami was sincerely sweet. Gina and I were born in the 70s and grew up as 80s kids and any 80s kid will tell you that The Neverending Story was a loved movie. Thank you Moonchild! Check out other special guest star cameos!
-
Mickey Abbott
Thank you Danny for the nuptual congratulations! Danny Woodburn is well known for his role of Mickey Abbott on Seinfeld. And thank you for playing trivia with us Danny! Mickey Abbott : You gave me gonorrhea and you didn’t even tell me! Cosmo Kramer : I gave you gonorrhea because I thought you’d have fun with it! Mickey Abbott : Well, you should have told me! Check out our other special guest star cameos!
-
Annie Korzen
Annie Korzen from Seinfeld had words of encouragement for Regina and Art! Annie played the role of Doris Klompus on Seinfeld. She is the sweetest. Thank you Annie! Doris would like to borrow red your pocketbook to go with her shoes. Don’t forget to visit Annie Korzen’s TikTok page! She is an inspiration that she has adopted the technology, embraced it, and become an influencer in this day and age. Huzza! Check out our other special guest star cameos!